產(chǎn)品型號:KCMA-9P1WARS KCM-9P1WARS KCME-9P1WARS KCMF-9P1WARS KCMG-9P1WARS KCMD-9P1WARS KCMA-9P2WARS KCM-9P2WARS KCME-9P2WARS KCMF-9P2WARS KCMG-9P2WARS KCMD-9P2WARS
| 序號 | 符號 | 名稱 | 說 明 |
|---|---|---|---|
| 0 | SP | 溫度設(shè)定值 | 當(dāng)參數(shù)run=0時才可設(shè)置此參數(shù) |
| 第一設(shè)置區(qū):參數(shù)修改 | |||
| 1 | AL-1 | 第一報警 | 報警方式請參考參數(shù)“ALP”當(dāng)解除報警時回差值均固定為0.5或5 |
| 2 | AL_2 | ?程序段報警 | AL_2值即為程序段執(zhí)行完后報警輸出時長單位(10秒) |
| 3 | Pb | 傳感器誤差修正 | 當(dāng)測量顯示值與實際值存在誤差時功氨,可以用此值修正 |
| 4 | P | 速率參數(shù) | P值類似常規(guī)PID調(diào)節(jié)器的比例帶,但變化相反,P值越大,比例、微分的作用成正比增強, P值越小,比例手幢、微分的作用相應(yīng)減弱,P參數(shù)值與積分作用無關(guān)捷凄。????設(shè)置P=0儀表轉(zhuǎn)為二位式控制。100 |
| 5 | I | 保持參數(shù) | I參數(shù)值主要決定調(diào)節(jié)算法中的積分作用,與常規(guī)PID算法中的積分時間類同,I值越小,系統(tǒng)積分作用越強,I值越大,積分作用越弱围来。設(shè)置I=0時借睬,系統(tǒng)取消積分作用,儀表成為一個PD調(diào)節(jié)器 |
| 6 | d | 滯后時間 | D參數(shù)對控制的比例、積分乃衫、微分均起影響作用,D越小,則比例和積分作用均成正比增強;反之,D越大,則比例和積分作用均減弱,而微分作用相對增強奏宽。此外D還影響超調(diào)抑制功能的發(fā)揮,其設(shè)置對控制效果影響很大。如設(shè)置D≤t(控制周期)時,系統(tǒng)的微分作用被取消 |
| 7 | T | 主控周期 | PID控制方式時繼電器的控制周期额神,時間越短踱措,控制效果越好,但會影響繼電器壽命央改。一般出廠值繼電器設(shè)置為10S |
| 8 | FILT | 濾波系數(shù) | 為儀表一階滯后濾波系數(shù)毕嘹,其值越大,抗瞬間干擾性能越強仑锥,但響應(yīng)速度越滯后沸幅,對壓力、流量控制其值應(yīng)較小德州,對溫度聪弊、液位控制應(yīng)相對較大。 |
| 9 | Hy | 主控回差(單邊) | 儀表為位式控制方式時的不靈敏區(qū)窝革,取值越小购城,控制效果越好,但當(dāng)為繼電器輸出時因頻繁跳動而影響其使用壽命 |
| 10 | dp | 小數(shù)點位置 | 熱電偶虐译、熱電阻信號輸入時設(shè)置范圍為0~1瘪板;電流、電壓信號輸入時設(shè)置范圍為0~4dp=0時漆诽,顯示格式為0000侮攀;???? dp=1時,顯示格式為000.0厢拭;dp=2時兰英,顯示格式為00.00撇叁;??? dp=3時,顯示格式為0.000 |
| 11 | outH | 輸出上限 | 當(dāng)儀表控制為電壓或電流輸出畦贸,儀表具有最小輸出和最大輸出限制功能陨闹。二位式控制時無意義 |
| 12 | outL | 輸出下限 | |
| 13 | AT | 自整定狀態(tài) | 0:關(guān)閉自整定功能;??????????? 1:啟動自整定功能 |
| 14 | LocK | 密碼鎖 | LOCK=0時薄坏,允許修改所有參數(shù)正林;LOCK=1時,只允許修改設(shè)定值(SP)與第二設(shè)置區(qū)內(nèi)的參數(shù)LOCK >1時裕消,禁止修改所有參數(shù) |
| 15 | Sn | 輸入方式 | CU50桃铛、PT100、K顶怠、 E假磺、 J、 T腻学、 S努扶、 R、 WR25券妹、 N晦了、 CCCC ; |
| 16 | OP-A | 主控輸出方式 | ‘0’無輸出;? ‘1’繼電器輸出啰氏;‘2’固態(tài)繼電器輸出普统;???? |
| 17 | OP-B | 副控輸出方式 | ‘0’無輸出; ‘1’RS232或RS485通訊信號赘双; ‘2’? 接微型打印機(jī)?? 3’0~10mA或0~5V變送輸出埋村; ‘4’4~20mA或1~5V變送輸出 |
| 18 | ALP | 報警方式 | ‘0’無報警;???? ‘1’上限報警祝峻;‘2’下限報警魔吐;?? ‘4’正偏差報警;?‘5’負(fù)偏差報警莱找; ‘7’區(qū)間外報警酬姆;‘8’區(qū)間內(nèi)報警;? |
| 19 | COOL | 正反控制 | 0:反向控制,如加熱;?????????? 1:正向控制,如制冷 |
| 20 | P-SH | 顯示上限 | 當(dāng)儀表為熱電偶或熱電阻輸入時,可限制設(shè)定值奥溺、報警值的設(shè)置范圍辞色;當(dāng)儀表為電壓、電流輸入時谚赎,其顯示上限淫僻、顯示下限決定了儀表的顯示范圍,其值和單位均可由用戶自由決定壶唤。 |
| 21 | P-SL | 顯示下限 | ?P-SH≥P-SL |
| 22 | Addr | 通訊地址 | 儀表在通信系統(tǒng)中的編號“通訊地址” |
| 23 | bAud | 通訊波特率 | ‘0’1200;‘1’2400;‘2’4800闸盔;‘3’9600四種可選 |
| 程序段相關(guān)參數(shù) | |||
| 25 | SEC | 時間單位 | 0:恒溫段以分鐘為最小單位 1:以秒為最小單位 |
| 26 | LOOP | 循環(huán)執(zhí)行 | 0:程序段結(jié)束后待機(jī) 1:程序段結(jié)束后自動從第一段執(zhí)行 |
| 27 | PED | 停電處理 | 0:停電記憶悯辙,需手動執(zhí)行(按三秒▲鍵執(zhí)行)1:停電回到第1段,需手動執(zhí)行(按三秒▲鍵執(zhí)行)2:停電記憶自動執(zhí)行3:停電不記憶自動從第1段執(zhí)行 |
| 28 | AL_P | 自動暫停帶 | PV-SV>AL_P,程序段暫停計時满页,直到PV-SV<AL_P, |
| 29 | run | 運行狀態(tài) | ‘0’停止:以基本設(shè)定值SP作常規(guī)恒溫控制预署;‘1’待機(jī):當(dāng)曲線程序控制完全結(jié)束后轉(zhuǎn)入此狀態(tài),此時儀表輸出關(guān)閉惑拙,儀表為單顯示狀態(tài)聂歹。‘2’暫停:以當(dāng)前的運行設(shè)定值作恒溫控制,儀表停止計時插呜;‘3’運行:儀表以設(shè)定好的斜率溫度和時間參數(shù)作曲線控制運行 |
| 30 | Pro | 程序段 | 當(dāng)前程序運行的段乘步,改變此參數(shù)能實行任意跳轉(zhuǎn),同時段已運行時間自動清零 |
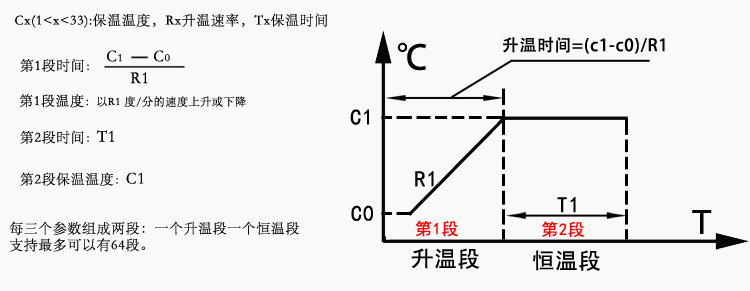
| 32 | rx(x<33) | 升溫時間 | 當(dāng)前升溫段的時間 |
| 33 | Tx(x<33) | 平臺x的運行時間 | 平臺1的保溫時間,當(dāng)時間設(shè)置為0 時砾楞,程序?qū)⑻^此段轉(zhuǎn)向下一段(即斜坡段) |
| 34 | Cx(x<33) | 平臺x的目標(biāo)溫度值 | 斜坡段1與平臺段1的目標(biāo)溫度值 |
余姚精創(chuàng)儀表有限公司 :擁有自主牌品牌“皓儀牌”榨降。專業(yè)研發(fā),生產(chǎn)銷售溫度儀表,溫度控制器,PID溫控儀,多路溫控儀,擁有雄厚的技術(shù)力量顿豹。
? tempinst.com 余姚精創(chuàng)儀表有限公司 版權(quán)所有 浙ICP備16029953號










