產(chǎn)品型號:KCMR-9P1WABS KCMR-9P2WABS
| 參數(shù)代碼 | 符號 | 名稱 | 取值范圍 | 說 明 | 出廠值 |
|---|---|---|---|---|---|
| 0 | SP | 溫度設(shè)定值 | 由P-SL艺演、P-SH決定 | 當(dāng)參數(shù)run=0時才可設(shè)置此參數(shù) | 50 |
| 第一設(shè)置區(qū):參數(shù)修改 | |||||
| 1 | AL-1 | 第一報警 | 由P-SL却紧、P-SH決定 | 報警方式請參考參數(shù)“ALP”當(dāng)解除報警時回差值均固定為0.5或5 | 200 |
| 2 | AL_2 | ?程序段報警 | 0-200 | AL_2值即為程序段執(zhí)行完后報警輸出時長單位(10秒) | 0 |
| 3 | Pb | 傳感器誤差修正 | ±20.0 | 當(dāng)測量顯示值與實際值存在誤差時,可以用此值修正 | 0 |
| 4 | P | 速率參數(shù) | 1~5000 | P值類似常規(guī)PID調(diào)節(jié)器的比例帶,但變化相反,P值越大,比例胎撤、微分的作用成正比增強, P值越小,比例晓殊、微分的作用相應(yīng)減弱,P參數(shù)值與積分作用無關(guān)。????設(shè)置P=0儀表轉(zhuǎn)為二位式控制伤提。100 | |
| 5 | I | 保持參數(shù) | 0~3000 | I參數(shù)值主要決定調(diào)節(jié)算法中的積分作用,與常規(guī)PID算法中的積分時間類同,I值越小,系統(tǒng)積分作用越強,I值越大,積分作用越弱巫俺。設(shè)置I=0時,系統(tǒng)取消積分作用,儀表成為一個PD調(diào)節(jié)器 | 500 |
| 6 | d | 滯后時間 | 0~2000S | D參數(shù)對控制的比例肿男、積分盘胯、微分均起影響作用,D越小,則比例和積分作用均成正比增強;反之,D越大,則比例和積分作用均減弱,而微分作用相對增強。此外D還影響超調(diào)抑制功能的發(fā)揮,其設(shè)置對控制效果影響很大要尚。如設(shè)置D≤t(控制周期)時,系統(tǒng)的微分作用被取消 | 100 |
| 7 | T | 主控周期 | 2~120S | PID控制方式時繼電器的控制周期刚驶,時間越短,控制效果越好朽擒,但會影響繼電器壽命牙吼。一般出廠值繼電器設(shè)置為10S | 10 |
| 8 | FILT | 濾波系數(shù) | 0~50 | 為儀表一階滯后濾波系數(shù),其值越大今搂,抗瞬間干擾性能越強柱称,但響應(yīng)速度越滯后,對壓力饼簸、流量控制其值應(yīng)較小臼磁,對溫度、液位控制應(yīng)相對較大倾皿。 | 20 |
| 9 | Hy | 主控回差(單邊) | 0.1~50.0 | 儀表為位式控制方式時的不靈敏區(qū)吊磕,取值越小,控制效果越好惩阶,但當(dāng)為繼電器輸出時因頻繁跳動而影響其使用壽命 | 0.5 |
| 10 | dp | 小數(shù)點位置 | 0~3 | 熱電偶挎狸、熱電阻信號輸入時設(shè)置范圍為0~1;電流断楷、電壓信號輸入時設(shè)置范圍為0~4dp=0時锨匆,顯示格式為0000;???? dp=1時冬筒,顯示格式為000.0恐锣;dp=2時,顯示格式為00.00舞痰;??? dp=3時土榴,顯示格式為0.000 | 1 |
| 11 | outH | 輸出上限 | outL~200 | 當(dāng)儀表控制為電壓或電流輸出诀姚,儀表具有最小輸出和最大輸出限制功能。二位式控制時無意義 | 200 |
| 12 | outL | 輸出下限 | 0~outH | 0 | |
| 13 | AT | 自整定狀態(tài) | 0~1 | 0:關(guān)閉自整定功能鞭衩;??????????? 1:啟動自整定功能 | 0 |
| 14 | LocK | 密碼鎖 | 0~50 | LOCK=0時学搜,允許修改所有參數(shù)娃善;LOCK=1時论衍,只允許修改設(shè)定值(SP)與第二設(shè)置區(qū)內(nèi)的參數(shù)LOCK >1時,禁止修改所有參數(shù) | 0 |
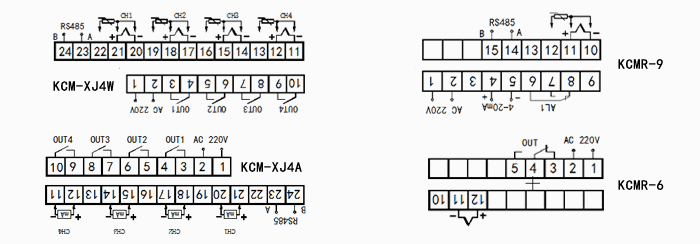
| 15 | Sn | 輸入方式 | —— | CU50聚磺、PT100瓤计、K、 E莹宁、 J圾峭、 T、 S审腺、 R堤谴、 WR25、 N确列、 CCCC ; | |
| 16 | OP-A | 主控輸出方式 | 0~7 | ‘0’無輸出栋固;? ‘1’繼電器輸出;‘2’固態(tài)繼電器輸出我昵;???? | 禁止修改 |
| 17 | OP-B | 副控輸出方式 | 0~4 | ‘0’無輸出埋署; ‘1’RS232或RS485通訊信號; ‘2’? 接微型打印機?? 3’0~10mA或0~5V變送輸出芬角; ‘4’4~20mA或1~5V變送輸出 | 禁止修改 |
| 18 | ALP | 報警方式 | 0~10 | ‘0’無報警绷匀;???? ‘1’上限報警;‘2’下限報警彻秆;?? ‘4’正偏差報警楔绞;?‘5’負(fù)偏差報警; ‘7’區(qū)間外報警唇兑;‘8’區(qū)間內(nèi)報警墓律;? | 1 |
| 19 | COOL | 正反控制 | 0~1 | 0:反向控制,如加熱;?????????? 1:正向控制,如制冷 | 0 |
| 20 | P-SH | 顯示上限 | P-SL~9999 | 變送輸出時,這對參數(shù)限定變送輸出量程上下限 | 1300 |
| 21 | P-SL | 顯示下限 | -1999~P-SH | -30 | |
| 22 | Addr | 通訊地址 | 0~63 | 儀表在通信系統(tǒng)中的編號“通訊地址” | 1 |
| 23 | bAud | 通訊波特率 | —— | ‘0’1200幔亥;‘1’2400耻讽;‘2’4800;‘3’9600四種可選 | 9600 |
| 程序段相關(guān)參數(shù) | |||||
| 25 | SEC | 時間單位 | 0~1 | 0:恒溫段以分鐘為最小單位 1:以秒為最小單位 | 0 |
| 26 | LOOP | 循環(huán)執(zhí)行 | 0~1 | 0:程序段結(jié)束后待機 1:程序段結(jié)束后自動從第一段執(zhí)行 | 1 |
| 27 | PED | 停電處理 | 0~3 | 0:停電記憶帕棉,需手動執(zhí)行(按三秒▲鍵執(zhí)行)1:停電回到第1段针肥,需手動執(zhí)行(按三秒▲鍵執(zhí)行)2:停電記憶自動執(zhí)行3:停電不記憶自動從第1段執(zhí)行 | |
| 28 | AL_P | 自動暫停帶 | 0~100.0 | PV-SV>AL_P,程序段暫停計時,直到PV-SV<AL_P, | 10 |
| 29 | run | 運行狀態(tài) | 0~3 | ‘0’停止:以基本設(shè)定值SP作常規(guī)恒溫控制香伴;‘1’待機:當(dāng)曲線程序控制完全結(jié)束后轉(zhuǎn)入此狀態(tài)慰枕,此時儀表輸出關(guān)閉具则,儀表為單顯示狀態(tài)。‘2’暫停:以當(dāng)前的運行設(shè)定值作恒溫控制具帮,儀表停止計時博肋;‘3’運行:儀表以設(shè)定好的斜率溫度和時間參數(shù)作曲線控制運行 | 0 |
| 30 | Pro | 程序段 | 0~64 | 當(dāng)前程序運行的段,改變此參數(shù)能實行任意跳轉(zhuǎn)停迫,同時段已運行時間自動清零 | 1 |
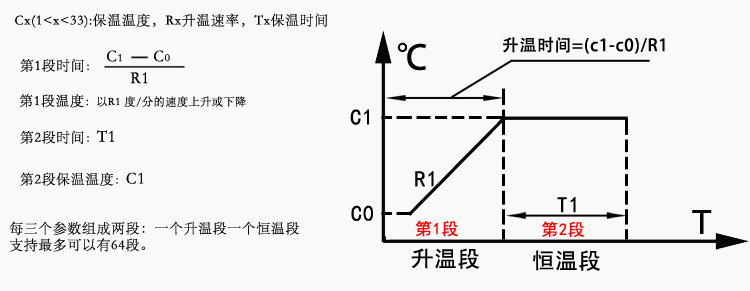
| 32 | rx(x<33) | 斜坡x的斜率 | 0~200.0??℃/min | 單位為℃/min 刹震,當(dāng)r=0時結(jié)束此次曲線控制運行而進(jìn)入待機狀態(tài)(run=1? pro=1),當(dāng)r=200.0時, 直接跳過此斜坡段而直接運行下一平臺段(即保溫段) | 10 |
| 33 | Tx(x<33) | 平臺x的運行時間 | 0~9999分 | 平臺1的保溫時間,當(dāng)時間設(shè)置為0 時擎若,程序?qū)⑻^此段轉(zhuǎn)向下一段(即斜坡段) | 10 |
| 34 | Cx(x<33) | 平臺x的目標(biāo)溫度值 | 由P-SL??P-SH決定 | 斜坡段1與平臺段1的目標(biāo)溫度值 | 50 |
余姚精創(chuàng)儀表有限公司 :擁有自主牌品牌“皓儀牌”环自。專業(yè)研發(fā),生產(chǎn)銷售溫度儀表,溫度控制器,PID溫控儀,多路溫控儀,擁有雄厚的技術(shù)力量漂肖。
? tempinst.com 余姚精創(chuàng)儀表有限公司 版權(quán)所有 浙ICP備16029953號