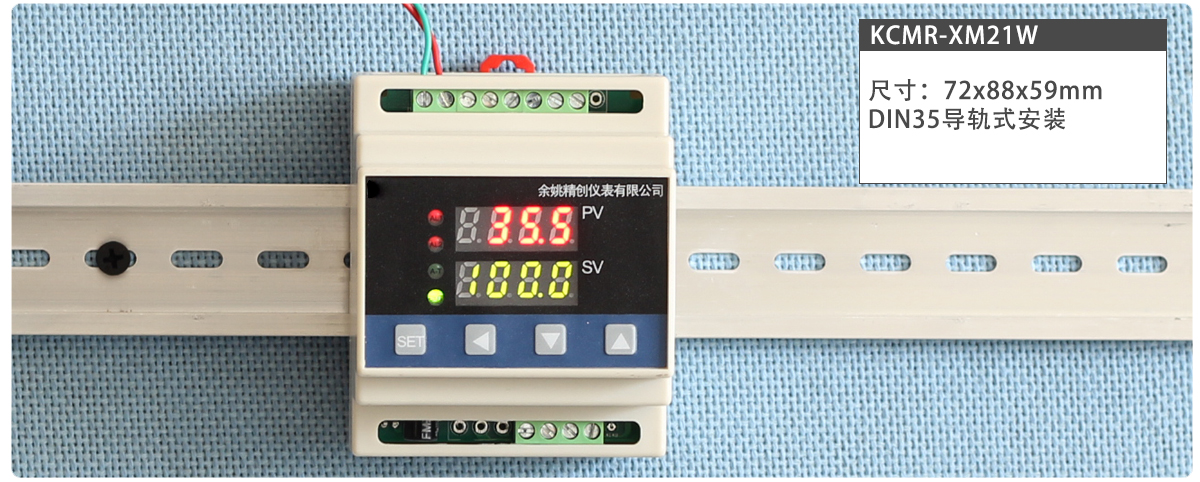
產(chǎn)品型號:KCMR-XM21WARS KCMR-XM21WA KCMR-XM21AA KCMR-XM21AARS
| 序號 | 提示符 | 名稱 | 說明 |
| 0 | LOCK | 密碼鎖 | LOC=18時,允許修改所有參數(shù)演易, LOC≠18時脏偏,禁止修改所有參數(shù) |
| 1 | SP | 設(shè)定值 | 控制點溫度設(shè)定參數(shù) |
| 2 | HY | 主控回差 | 儀表為位式控制方式時的不靈敏區(qū) |
| 3 | AL_1 | 報警設(shè)定值 | 報警點溫度設(shè)定參數(shù) |
| 4 | AL_2 | ||
| 5 | HY_1 | 報警回差 | 用于報警觸點輸出的回差設(shè)定(單邊回差) |
| 6 | HY_2 | ||
| 7 | SC1 | 傳感器修正值 | 測量傳感器引起誤差時,可以用此值修 |
| 8 | SC2 | ||
| 9 | ALP | 報警方式 | 0:無報警輸出 1:2路上限報警 2:2路下限報警 3:AL1上限報警? AL2下限報警 4:AL1下限報警? AL2上限報警 5:AL1溫差上限報警(PV1-PV2) AL2溫差上限報警(PV2-PV1) 6:AL1溫差下限報警(PV1-PV2) AL2溫差下限報警(PV2-PV1) 7: AL1溫差上限報警(PV1-PV2) AL2溫差下限報警(PV2-PV1) 8: AL1溫差下限報警(PV1-PV2) AL2溫差上限報警(PV2-PV1) |
| 10 | OPA | 主控方式 | OPA=0:無主控輸出 OPA=1:PV1變送輸出 OPA=2:PV2變送輸出 OPA=3:溫差變送輸出(PV1-PV2) OPA=4:溫差變送輸出(PV2-PV1) OPA=5:絕對溫差變送|PV1-PV2| OPA=6: PV1? PID輸出 OPA=7: PV2? PID輸出 OPA=8: 溫差PID(PV1-PV2) OPA=9: 平均PID(PV1+PV2)/2 |
| 11 | P | 比例系數(shù) | P值類似常規(guī)PID調(diào)節(jié)器的比例帶 設(shè)置P=0儀表轉(zhuǎn)為二位式控制坝偶。 |
| 12 | I | 積分系數(shù) | 為了消除穩(wěn)態(tài)誤差掺胖,在控制器中必須引入“積分項”。 |
| 13 | D | 微分系數(shù) | 控制器的輸出與輸入誤差信號的微分(即誤差的變化率)成正比關(guān)系 |
| 14 | T | 控制周期 | 指主控為PID控制方式的控制周期 |
| 15 | U0 | 初始功率 | PID智能控制時的初始輸出功率 |
| 16 | AT | 自整定開關(guān) | OFF:自整定功能關(guān)閉 ON:自整定功能開啟 自整定過程請參考“六醉檐、自整定方法” |
| 17 | COOL | 正反控制 | 0:正向控制,如加熱盾叭,加濕; 1:反向控制,如制冷,除濕 |
| 18 | PF | 濾波系數(shù) | 為儀表一階滯后濾波系數(shù)勿镇,其值越大肄高,抗瞬間干擾性能越強,但響應(yīng)速度越滯后蚂兴。 |
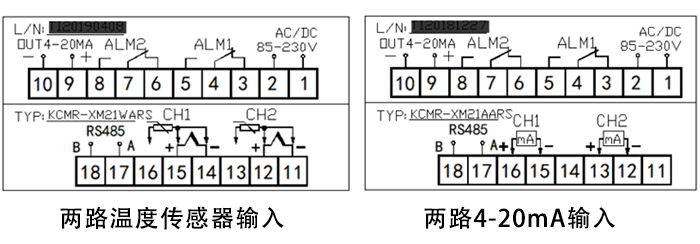
| 19 | SN | 輸入規(guī)格 | CU50柒浙、Pt100、K章姓、E佳遣、J、T或4-20mA |
| 20 | PB_H | 變送上限 | 設(shè)定輸出20mA(或10v)時的溫差值 |
| 21 | PB_L | 變送下限 | 設(shè)定輸出4mA(或0v)時的溫差值 |
| 22 | PSH1 | 量程上限 | 第1路電流信號顯示上限 下限 當輸入模擬量信號時顯示本條參數(shù) |
| 23 | PSL1 | 量程下限 | |
| 24 | PSH2 | 量程上限 | 第2路電流信號顯示上限 下限 當輸入模擬量信號時顯示本條參數(shù) |
| 25 | PSL2 | 量程下限 | |
| 26 | DP | 小數(shù)點 | 小數(shù)點位置 |
| 27 | OUTH | 輸出上限 | OUT主控輸出功率的最高與最低限幅 電流輸出4-20mA即為4.0-20.0 電壓輸出0-10v即為0-20.0 |
| 28 | OUTL | 輸出下限 | |
| 29 | OPB | 通訊功能 | 0.無通訊啤覆; 1.RS485串口通訊 |
| 30 | ADDR | 通訊地址 | 儀表在集中控制系統(tǒng)中的編號 |
| 31 | BAUD | 通訊波特率 | 1200苍日; 2400; 4800窗声; 9600 四種可選 |
余姚精創(chuàng)儀表有限公司 :擁有自主牌品牌“皓儀牌”相恃。專業(yè)研發(fā),生產(chǎn)銷售溫度儀表,溫度控制器,PID溫控儀,多路溫控儀,擁有雄厚的技術(shù)力量笨觅。
? tempinst.com 余姚精創(chuàng)儀表有限公司 版權(quán)所有 浙ICP備16029953號